随着工业5.0时代的到来,智能制造不再只是追求自动化和智能化技术的进步,而是将人的因素置于智能制造的核心,更强调人的创造力和隐性知识对制造系统的积极影响和生产过程中人的价值与感受。在“以人为本”的理念下,对人机共融环境下人的决策、加工水平和健康度对企业的影响进行研究是提高生产灵活度、预防员工职业病、降低财产损失并保障生产质量与效率的必要手段。然而,现有智能车间实时调度方法普遍忽视人的动态变化,难以在提升效率的同时保证员工体验与调度鲁棒性。
为解决这一关键瓶颈,我院顾文斌教授团队提出了一套系统性的建模与求解框架。团队首先从人的生理与行为特征出发,构建了能够量化人员状态的效率函数,并在此基础上建立了兼顾人机协同关系的具有不相关并行机的混合流水车间的实时调度问题(HMHFSP-UPM)的数学模型。随后将问题形式化为马尔科夫决策过程(MDP),并设计了面向人机协同的实时调度流程、交互点、实时生产状态、调度动作库与基于完成度的奖励机制等五大要素。为保障在线决策的稳定性与泛化能力,团队进一步提出了一种基于分布式柔性动作—评价的训练算法,使智能体能够在关键交互点自适应选择最优调度动作,兼顾生产效率与人因约束。
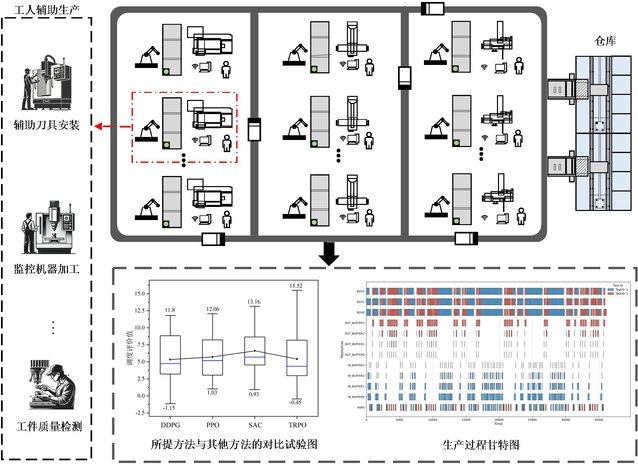
面向人机混合协同的智能车间系统架构
研究团队在自主搭建的智能车间原型与仿真平台上进行了大规模验证实验。实验结果表明:与现有经典调度方法相比(如GP、DDPG、PPO),所提方法在总完工时间、工人平均效率与调度鲁棒性等指标上均有显著提升(生产效率最高提升35.86%)。与传统 HFSP 模型相比,HMHFSP-UPM 更贴近真实生产的人机协同场景,具有更高的实用性与工程可实施性。
本研究以“面向人机协同的智能车间实时调度优化研究”为题,于2025年10月16日发表在《机械工程学报》。该成果由顾文斌教授牵头完成,主要合作者包括我校硕士生汪磊、郭镇洋、唐娜。研究工作得到国家自然科学基金(51875171)、江苏省自然科学基金面上(BK20221231)、江苏省研究生科研创新计划(KYCX24_0823)等项目资助。
(图文:顾文斌 审核:王延杰)